Электромеханические характеристики на валу тягового электродвигателя постоянного тока
Рис. 4.3. Нагрузочные характеристики тягового электродвигателя
Нагрузочные характеристики можно использовать для расчета и построения электромеханических характеристик на валу тягового электродвигателя n(Iд) по формуле (4.4), а также вращающего момента М(Iд). Зависимость вращающего момента (Н*м) от тока тягового электродвигателя Iд и магнитного потока Ф выражается формулой:
М = 9,55С1Ф/Л - AM, (4.5)
где ДМ — момент, возникающий вследствие механических и магнитных потерь в электродвигателе, Н-м:
 (4.6)
(4.6)
здесь: ΔРМЕХ и ΔРМАГН — соответственно мощность механических и магнитных потерь, Вт; п — частота вращения, об/мин.
Вращающий момент без учета магнитных и механических потерь называют электромагнитным вращающим моментом:
Мэм = 9,55С1ФIД. (4.7)
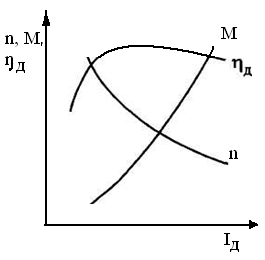
Рис. 4.4 Электромеханические характеристики тягового электродвигателя последовательного возбуждения
Формулы (4.4) .(4.6) используют для расчета и построения кривых n(Iд) и М(Iд) при проектировании тяговых электродвигателей. Используя формулу (2.4), определяют частотувращения при заданном напряжении U и известных значениях конструктивной постоянной электродвигателя и сопротивления его обмоток для каждого тока Iд и соответствующего ему тока возбуждения Iв. Затем по формуле (4.6) и известным значениям механических и магнитных потерь вычисляют ΔM для каждой скорости и тока Iд и вращающий момент М при каждом токе Iд. Обычно определяют 8 . 10 точек и наносят на графики. На рис. 4.4 приведены для примера электромеханические характеристики на валу тягового электродвигателя последовательного возбуждения.
В тяговом электродвигателе происходит преобразование подведенной к нему электрической энергии в механическую, расходуемую на движение поезда. При этом часть энергии теряется. Общая мощность потерь ΔР, складывается из отдельных составляющих:
ΔРХ = ΔРМ + ΔРЩ + ΔРмех + ΔРмагн + ΔРдоб, (4.8)
где ΔРМ — мощность потерь в меди обмоток; ΔPЩ — переходные потери в месте контакта щеток; ΔРмех — механические потери; ΔРмагн — магнитные потери при холостом ходе; ΔЯдо6 — добавочные потери при нагрузке.
Потери в меди обмоток ΔРМ вызываются тепловым действием тока при его прохождении по проводникам обмоток якоря, главных и дополнительных полюсов и компенсационной обмотке:
ΔРм=ΣI2ri
Где I – ток, проходящий по обмотке, A; ri — сопротивление i-й обмотки, Ом.
Переходные потери в щеточном контакте DРЩ возникают в местах контакта щеток. По ГОСТ 2582 — 81* эти потери определяют из расчета падения напряжения ΔUщ, равного 3 В для щеток положительной и отрицательной полярности, в том случае, когда у них нет гибких шунтов, и равного 2 В при использовании щеток с шунтами:
ΔРщ = ΔUщI.
За счет потерь в меди и местах контакта щеток, которые называют электрическими потерями, уменьшается числитель в формуле (4.4), и снижается частота вращения тягового электродвигателя. На значение вращающего момента эти потери не влияют.
Механические потери ΔРмех возникают из-за трения вала в моторно-якорных подшипниках, щеток о коллектор, якоря о воздух. У двигателей с самовентиляцией добавляются потери из-за вращения лопастей встроенного в машину вентилятора, прогоняющего охлаждающий воздух через электродвигатель. Эти потери возрастают с увеличением частоты вращения, а от нагрузки электродвигателя зависят незначительно.
Магнитные потери при холостом ходе ΔРмагн складываются из потерь на гистерезис и потерь от вихревых токов в сердечнике и зубцах якоря тягового электродвигателя. Они возрастают с увеличением магнитного потока и частоты вращения якоря, т.е. частоты перемагничивания стали.
Добавочные потери при нагрузке ΔРдоб добавляются к основным магнитным потерям. Они возникают вследствие искажения основного магнитного потока, наведения вихревых токов в полюсных наконечниках, неравномерного распределения токов по сечениям шин и щеток, возникновения токов в уравнительных соединениях. Эти потери возрастают с увеличением нагрузки электродвигателя. ГОСТ 2582 — 81* рекомендует добавочные потери определять в зависимости от тока нагрузки по табл. 4.1.
Таблица 4.1
|
Ток нагрузки в процентах от номинального |
20 |
60 |
80 |
100 |
130 |
160 |
200 |
|
Добавочные потери в процентах от магнитных потерь при холостом ходе |
22 |
23 |
26 |
30 |
38 |
48 |
65 |