Виды девиации магнитного компаса
1) поправку гирокомпаса определять либо на стоянке судна, либо когда оно 1,5—2 ч следует с неизменной скоростью и постоянным курсом;
2) после маневра судна, связанного с поворотом на новый курс, сличить показания магнитного и гироскопического компасов сразу после окончания поворота с тем, чтобы определить величину новой поправки магнитного компаса на тот случай, если гирокомпас выйдет из строя. Повторить сличение показаний гирокомпаса и магнитного компаса через 1,5—2 ч после маневра и полученное значение поправки магнитного компаса считать уточненным и принимать это значение в последующем;
3) в течение полутора-двух часов после маневра не следует определять место судна по пеленгам двух предметов. В случае необходимости такого определения полученное место судна нельзя считать достоверным. При определении места судна по пеленгам трех предметов необходимо пеленгование выполнять как можно быстрее (в течение 1—2 мин) с тем, чтобы все пеленги содержали ошибку примерно одной и той же величины, которую затем надо исключить известным из навигации способом. Лучше всего в рассматриваемом случае определять место судна способами, не связанными с пеленгованием;
4) способ уничтожения и определения девиации магнитного компаса по сличению с гирокомпасом при условии, что судно совершает повороты, имея линейную скорость, следует считать приближенным.
При развороте судна на месте (например, с помощью буксиров) инерционная девиация в показаниях гирокомпаса не возникает и указанный способ становится более точным.
Следует помнить, что эти рекомендации имеют смысл только в том случае, если при маневре vN имеет величину не менее 5 узлов.
Для компенсации скоростной погрешности V к гирокомпасу присоединяют специальное устройство — корректор. Корректор имеет два диска, наложенных один на другой (рис. 37). Нижний диск, соединенный со следящей системой гирокомпаса, строго ориентирован относительно гиросферы. Его паз П расположен по оси ОЕК гиросферы. При повороте судна следящая система гирокомпаса возвращается в согласованное с гиросферой положение, а паз нижнего диска будет всегда направлен на восток гиросферы независимо от возможного изменения курса судна. Верхний диск, наложенный на нижний, соединен с последним в точке А штырем особой конструкции, укрепленным с нижней стороны верхнего диска на расстоянии О1А =Rowo от центра этого диска.
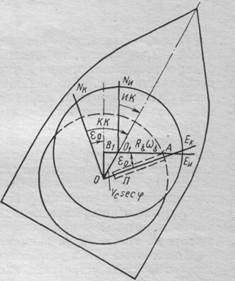
Палец западает в паз нижнего диска, эксцентрично соединяя оба диска. Верхний диск укреплен на специальной каретке и может сдвигаться относительно нижнего в направлении диаметральной плоскости судна. Расстояние 001 между центрами дисков можно устанавливать в зависимости от известных величин скорости судна и широты места. Из рис. 37 видно, что направление паза П нижнего диска соответствует направлению
Ек — на восток гиросферы, поэтому курс судна по показаниям гиросферы, содержащий скоростную погрешность v, определится углом КК.
Устранение из показаний гирокомпаса скоростной погрешности V достигается установкой каретки с верхним диском в направлении диаметральной плоскости судна так, чтобы расстояние между центрами дисков было равно величине 001 = vcsec . Тогда курс КК, отсчитываемый по показаниям гиросферы, будет отличаться на величину угла 0 от курса ИК, отсчитываемого по верхнему диску (картушке компаса) от линии Nи01. Линия Nи01 перпендикулярна направлению 01А. Следовательно,
КК = ИК + 0.
Из прямоугольного треугольника B1OA находим:
tg 0 = B1O/(AO1 + B1O1)
В гирокомпасе с электромагнитным управлением использован более простой способ устранения баллистических девиаций. Для этого маятник индикатора горизонта сильно задемпфирован, а углы его отклонения от равновесного положения ограничены специальными упорами до относительно малой величины.