Создание упрощенной математической модели движения судна, управляемого рулем и винтом
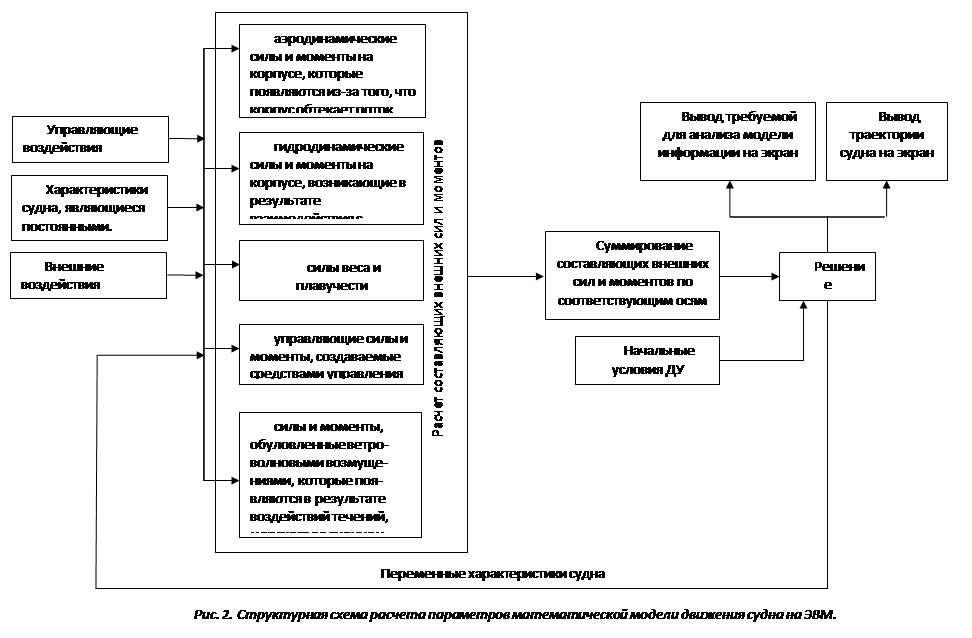
Функционирование ММДС в среде Matlab Simulink осуществляется следующим образом. В исходном текстовом файле задаются геометрические характеристики корпуса, руля и винта (либо другого движительно-рулевого комплекса). В этом же файле приводятся формулы для расчета постоянных коэффициентов, зависящих от вышеуказанных характеристик судна. Математическая модель состоит из ряда функциональных блоков, соединенных между собой связями и образует замкнутую систему, т.е. выходные величины после их вычисления подставляются в расчетные формулы и вычисляются в ходе работы программы заново. В окне параметров симуляции выбирается метод, промежуток и максимально допустимая погрешность интегрирования, а также максимальное и минимальное значение шага интегрирования (в зависимости от решаемой задачи). Структурная схема расчета параметров математической модели показана на рис. 2.
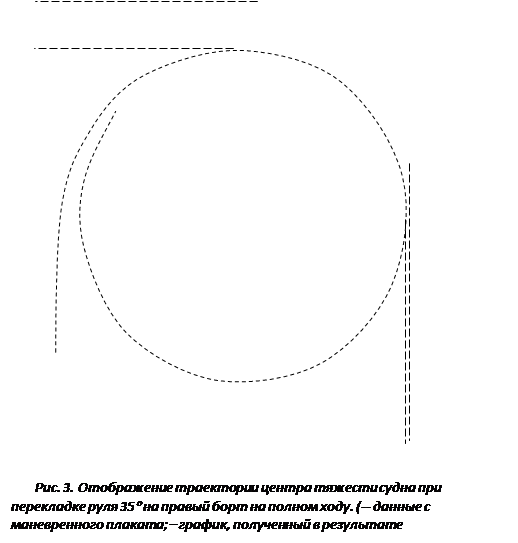
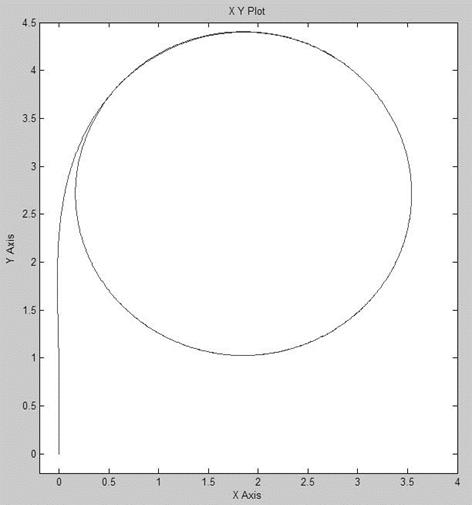
Проверка достоверности ММДС, предложенной автором, была выполнена во время прохождения практики на самовыгружающемся балкере «CSL Spirit». В результате расчета и подстановки в модель коэффициентов для вышеуказанного судна (L = 225 m, B = 32.2 m, T = 8.8 m) получена траектория движения центра тяжести при выполнении маневра «циркуляция» (угол перекладки руля - 35° на правый борт, начальная скорость – 15.8 узлов), приведенная на рис. 3 (координаты даны в кабельтовых).
Выводы и перспектива дальнейшей работы по данному направлению:
В качестве исходной математической модели была принята система (1).
При воплощении ММДС на ЭВМ была выбрана система математического моделирования Matlab Simulink 6.5.0.1.
Для решения данной системы, благодаря своей простоте и высокой точности, были выбраны численные методы интегрирования, в основе которых лежит метод Рунге-Кутта.
Упрощения математической модели на первом этапе создания, можно добиться, вводя следующие условия: судно движется на глубокой тихой воде, в безветренную погоду, крен и дифферент не учитываются.
Приведенная структура уравнений с переменными коэффициентами, по сравнению с более упрощенными моделями с постоянными коэффициентами [1, 3, 5], удобна тем, что в нее легко добавлять новые компоненты и удалять ненужные. Это позволяет приспосабливать модель к требуемым расчетам.
Разработанная ММС позволяет при задании различных управляющих воздействий рассчитывать траекторию движения судов заданного типа.