Синтез рулевого привода
Требуется синтезировать рулевой привод, о котором заранее известно то, что он содержит в себе рулевую машину, гибкую и жёсткую обратные связи. Известны максимальные значения выходной величины (максимальный угол отклонения руля) и скорость её изменения (скорость отклонения руля).
Уже была определена постоянная времени самолёта ![]() с. Постоянная времени рулевой машины
с. Постоянная времени рулевой машины ![]() с. Время регулирования рулевого привода
с. Время регулирования рулевого привода ![]() с.
с.
Время регулирования в системе ![]() с.
с.
Модель рулевого привода с рулевой машиной показана на рис. 9.
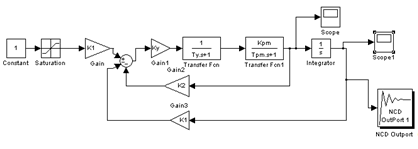
Рис. 9 Структурная схема рулевого привода с комбинированной обратной связью
Выбрано ![]() с. Коэффициент рулевой машины определяется через отношение максимальной скорости отклонения руля к максимальному значению управляющего тока
с. Коэффициент рулевой машины определяется через отношение максимальной скорости отклонения руля к максимальному значению управляющего тока ![]() град/(мА*с). 80 градусов слишком много, тут должно было градусов 30-40 в числителе.
град/(мА*с). 80 градусов слишком много, тут должно было градусов 30-40 в числителе.
Подбор коэффициентов жесткой и гибкой обратной связей К1 и К2 для получения оптимального переходного процесса осуществим с помощь блока NCD программной среды Matlab/Simulink. В результате моделирования получили следующие значения: K1=68.63; K2=1.38.
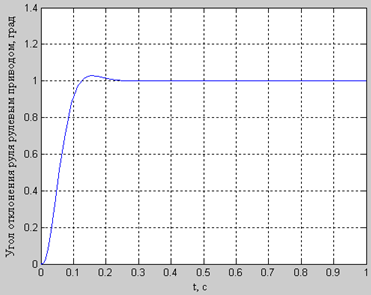
Рис.10 Угол отклонения руля рулевым приводом
Время регулирования составило 0,11 с, что соответствует требованиям.
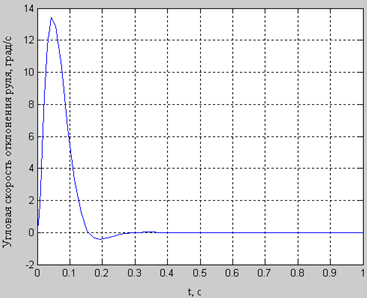
Рис.11 Скорость отклонения руля рулевым приводом
ПФ рулевого привода:
![]() .
.
Подставив известные ПФ и значения коэффициентов:
![]() .
.
Где: ![]() ;
;
 ;
;
![]() ;
;
![]() .
.
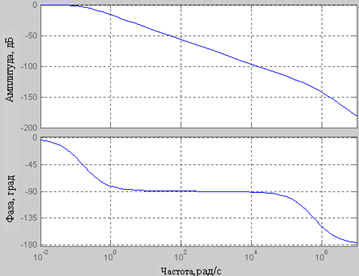
Рис. 11 Частотные характеристики замкнутой системы
Проанализируем передаточную функцию разомкнутой системы:
![]()
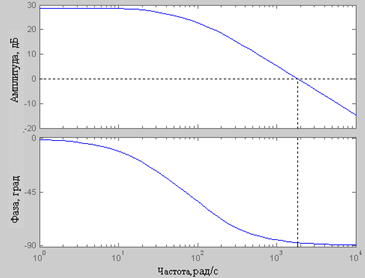
Рис. 12 Частотные характеристики разомкнутой системы
Система является неустойчивой, необходима дополнительная коррекция.