Синтез оптимального закона регулирования
Закон регулирования ложится в основу для создания системы повышения устойчивости и стабилизации (СПУУ).
Требуется обеспечить:
1 Точное воспроизведение управляющего воздействия во всём диапазоне изменения режимов полёта.
2 Устойчивость ЛА во всех режимах полета.
3 Слабую зависимость характеристик управляемости от высоты и скорости полёта.
4 Компенсацию влияния внешних возмущений.
Такая система называется автоматом парирования.
Законом регулирования (управления) называется формула, определяющая отклонение руля, в которой учитываются только основные составляющие сигнала.
Синтез оптимальной системы стабилизации производится в среде Matlab. Здесь то, что было в электронной методичке.
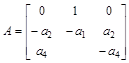
Запишем уравнения движения ЛА в виде пространства состояний:
![]() ;
;
![]() .
.
Исходные уравнения имеют вид:
![]() ;
;
![]() .
.
Обозначим ![]() ,
, ![]() , получим
, получим
![]() ;
;
![]() ;
;
![]() .
.
 ;
; ![]() ;
;  ;
;  ; B1= B.
; B1= B.
Интерес представляют графики ![]() и
и![]() , поэтому матрицы С и D имеют вид:
, поэтому матрицы С и D имеют вид:
 ;
;
D=0.
Подбирая весовые коэффициенты, основываясь на требованиях к максимально допустимым значениям, получаем следующие переходные процессы.
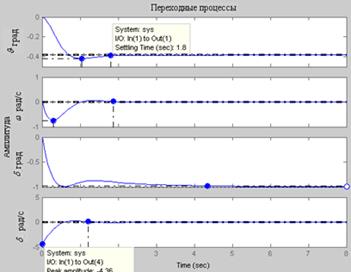
Рис. 14. Переходные процессы системы
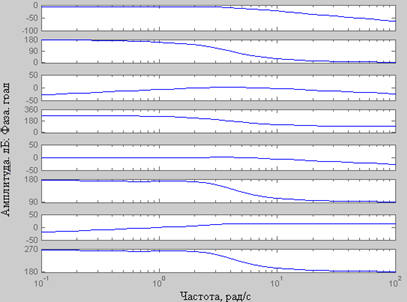
Рис. 15 Частотные характеристики системы
Дальше фильтр Калмана
Cпроектировали систему стабилизации воздушного судна по углу тангажа, получили передаточные функции летательного аппарата и системы стабилизации, а также проведение анализа проектируемой системы на устойчивость.