Обоснование безопасных и эффективных приемов управления судном в различных условиях плавания
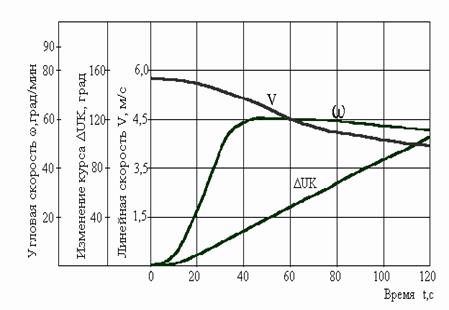
Рис 3.1 Зависимость w, DИK, V = f (t)
Таблица 3.3
Таблица циркуляции
|
DИKo |
ta, c при αр= 30о |
|
10 |
36 |
|
20 |
57 |
|
30 |
74 |
|
40 |
94 |
|
50 |
114 |
|
60 |
128 |
|
70 |
147 |
|
80 |
164 |
|
90 |
188 |
|
120 |
205 |
|
150 |
240 |
|
180 |
276 |
|
270 |
298 |
|
360 |
326 |
|
Дц, м |
451 |
|
Кб |
2,4 |
|
Vo, км/ч |
20 |
|
Уз |
10,7 |
|
Vy, км/ч |
12,6 |
|
Уз |
6,8 |
Время перекладки руля на борт - 10 сек.
Инерционные характеристики
Задачей данного раздела является количественная оценка маневров активного и пассивного торможения, а так же подтормаживания.
Активное торможение
Определяем вспомогательные величины:
 кН, (40)
кН, (40)
где Ршв - полезная тяга винта при работе на швартовах при переднем ходе;
Кр, КМ - коэффициенты упора;
no - номинальная частота вращения гребного винта;
Np - мощность подводимая к винту.
Np = Ne0.95 = 1766*0.95 = 1677.7 кВт. (41)
Определяем значения коэффициентов:
 (42)
(42)
![]() , (43)
, (43)
где R0 - сопротивление воды движению судна, кН;
m - водоизмещение судна, т.
![]() . (44)
. (44)
Определяем полезную тягу винтов на задний ход:
 (45)
(45)
где Рзх = Ршв. Для нашего судна принимаем продолжительность периода остановки винтов t1=40 сек. Приводим продолжительность первого периода к безразмерному виду.
ТД = аt1 = 0,0029*40 = 0,116. (46)
Определяем значения с графиков [1, с.28]:
![]() ,
,
![]() ,
,
где ![]() - безразмерная скорость в первом периоде;
- безразмерная скорость в первом периоде;
![]() - безразмерный путь в первом периоде.
- безразмерный путь в первом периоде.
Определяем величины А1 и В1:
 , (47),
, (47), ![]() . (48)
. (48)
Функции f1 (A1,B1) и f2 (A1,B1) определяем по графику [1, с.28].